Written by Bogdan Løw-Hansen, PhD candidate.
Today, harsh weather conditions and especially icing are a big problem for uncrewed aerial vehicles (UAVs). Several solutions exist, but many require substantial amounts of energy to operate them, which are not always available on smaller UAV platforms. To this end, the UAV Icing Lab at NTNU is currently conducting research on the optimization of an electrically heated de-icing system. The researched solution is based on an ice shedding detection algorithm presented here.
The problem with icing
Research on in-flight icing for uncrewed aerial vehicles (UAVs) is a new topic that has only recently started to gain momentum. This is driven by several factors. For example, a survey on civil applications of UAVs reports that small to mid-sized UAVs with a wingspan up to a couple of meters have significant potential to succeed in many commercial applications [1]. Other factors are based on the fact that UAVs have already been shown to be effective in critical missions such as search and rescue, human organ transport, and surveillance [2,3]. Furthermore, UAVs have been able to provide crucial capabilities in modern warfare [4]. For instance, in the ongoing conflict in Ukraine, the Ukrainian forces have been so successful at deploying their UAVs that it has led to the creation of a patriotic song about them [5]. Together, the high utility of current UAVs and the projected growth of the global UAV market, estimated to reach over $25.13 billion by 2027 [6], have opened opportunities for further funding of UAV research. One of the research topics presently receiving attention and funding is the operation of UAVs in harsh weather conditions. Among the challenging weather conditions, the icing conditions, which cause a build-up of ice on the wings of the UAV during flights, are considered to be especially problematic.
In-flight icing is a critical issue to solve because it has been recognized as a severe hazard for UAVs, leading to problems ranging from reduced flight performance to complete loss of the vehicle in extreme situations [7]. Furthermore, icing conditions are relatively common phenomena, especially in cold climate regions such as northern Europe and northern America. In fact, if icing conditions weren’t a problem, the time window of when it is safe to operate a UAV could have been more than doubled in certain locations [8].
The electric ice protection system
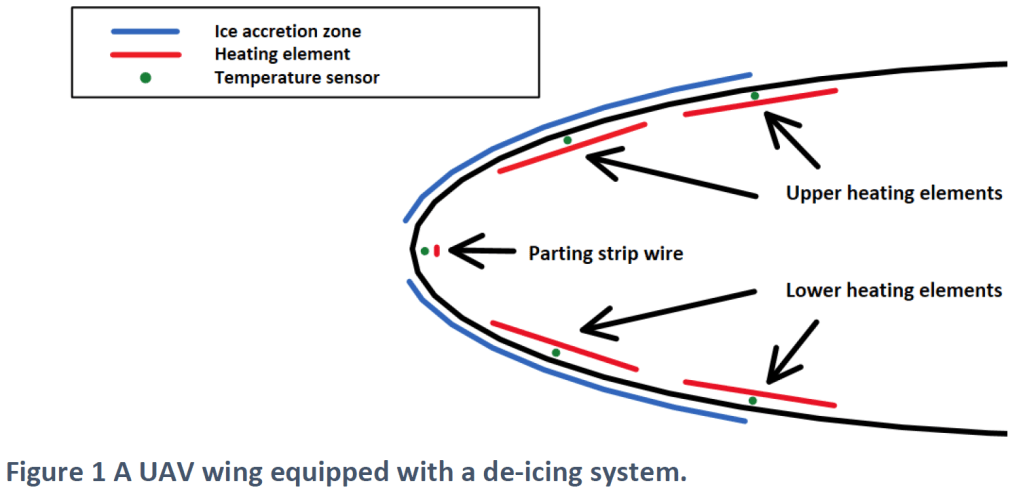
One of the developed solutions to make UAV operations in icing conditions safe is based on an electric heating system. The heating system uses power stored in batteries on board the UAV to heat the UAV wings when the vehicle is experiencing icing. This makes it difficult for the built-up ice to stick to the wings’ surface and leads to ice shedding. Figure 1 shows a schematic of such a heating system inside a UAV wing. The particular system displayed in Figure 1 is developed by UBIQ Aerospace in collaboration with the NTNU UAV Icing Lab. The IPS has four heating panels and one heating wire per wing. All of the heating elements stretch across the length of the wing. In addition, the IPS includes five temperature sensors used to measure the effectiveness of the applied heat.
Optimizing the ice protection system with an ice shedding detection algorithm
The electrically-heated IPS is used to initiate ice shedding when a critical amount of ice has been accumulated. A successful ice shedding is presented in Figure 2. The process shows a de-icing test performed in an icing wind tunnel, in which a UAV wing section is exposed to artificial icing conditions. The de-icing process can be described as follows. When enough ice has accumulated, the heating elements are used to melt some of the ice nearest to the wings’ surface. This loosens the ice, letting the incoming air shed the ice off the wings. By applying heat and shedding the ice, the IPS makes it possible to ensure that the amount of build-up ice never reaches the point where it becomes dangerous for the UAV. However, there are a number of problems associated with the use of IPSs in UAVs. One of them is that such electrically-heated de-icing systems use a lot of energy that otherwise could have been used to extend the flight time of the vehicle. In this article, an ice shedding detection algorithm is presented as a solution to the energy consumption issue. It works because an ice shedding detection system makes it possible for the heating to be turned off shortly after ice shedding has occurred. Thus, significantly reducing the amount of energy needed to operate the heating system. In contrast, without such detection systems, the heating cycles operate irrespective of the ice shedding status based on conservative estimates of how long the heat must stay on before the ice is removed.

Ice shedding detection
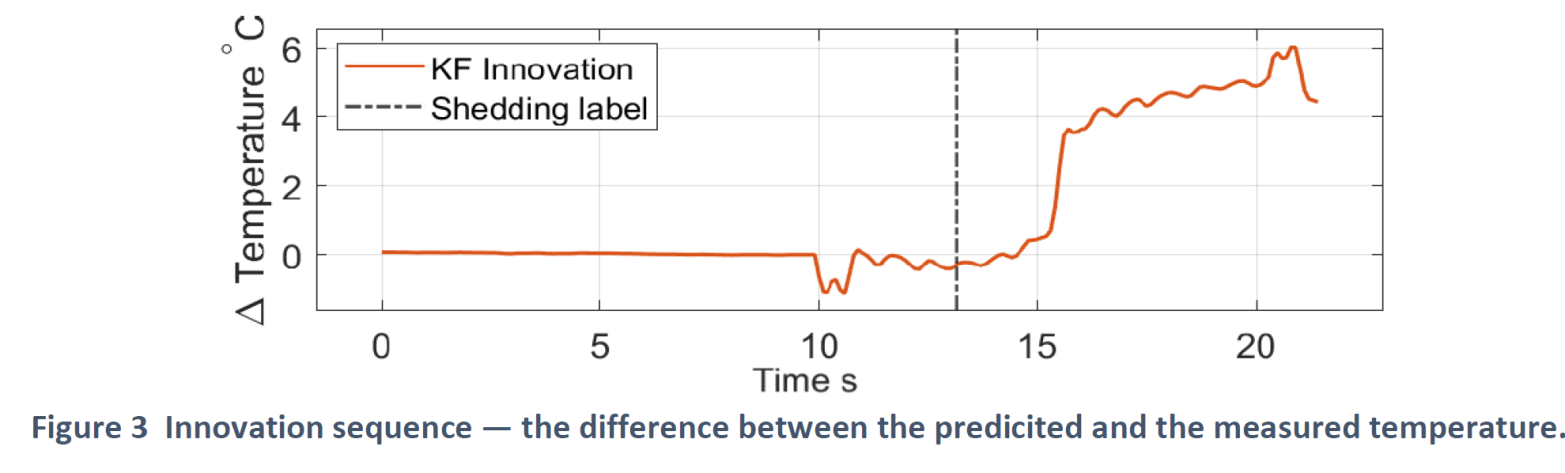
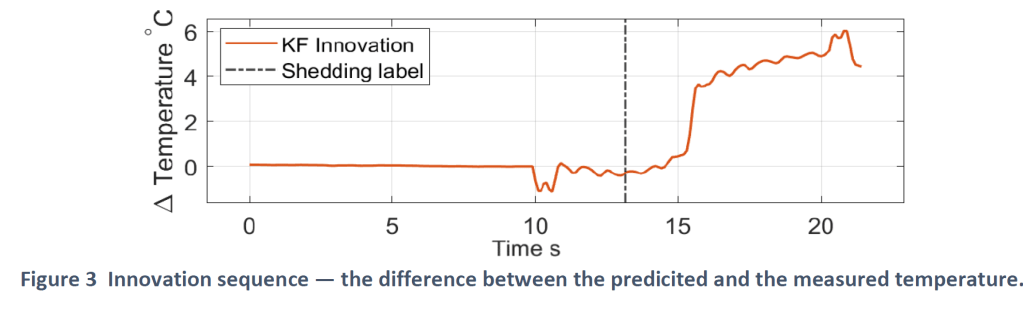
The ice shedding detection algorithm works by using two sources of information. The temperature sensors embedded in the wings and a model that relates the temperature measurements to the input from the heating panels. By comparing the expected temperature to the measured temperature, one obtains an error signal called the “innovation sequence.” The properties of the innovation sequence are such that it stays close to zero when the model and the measurements agree and grows large when they disagree. An example where the model and the measurements agree for the first 15 seconds is shown in Figure 3.
Now assume one has obtained a model of how the temperature in a UAV wing should behave when a layer of ice is surrounding it. With such a model, one can set up a detection threshold, based on the innovation sequence, to detect when the wing goes from being iced to being ice-free. By comparing data from several experiments, a threshold was found that could quickly and reliably identify ice shedding through the change of state in the wing from iced to ice-free. Figure 4 shows the four such detections in different de-icing experiments. The value αPU in the Figure 4 plots is the threshold at which the ice shedding detections are made.
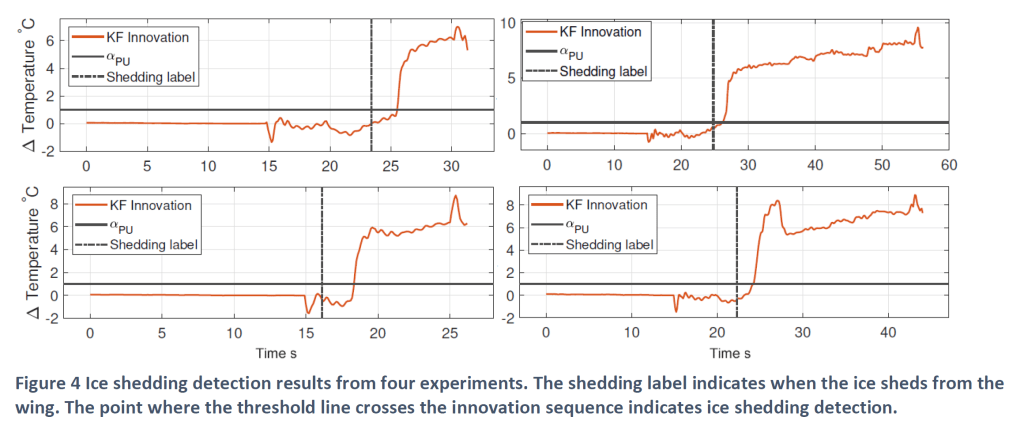
The results show that ice shedding detection on a UAV is achievable. Furthermore, the average detection time of the presented method is only 2 seconds, allowing for efficient use of the IPS. The next step for the developed ice shedding detection system is to apply it in an actual flight, not only in an icing wind tunnel. Furthermore, it would be interesting to test the system together with an ice detection system which is supposed to initiate the de-icing process. To sum up, this research resulted in a method that can significantly reduce the energy requirements for UAV ice protection systems. By using this method in the future, UAVs will be able to operate safely and conduct longer missions inside icing conditions.
References
[1] Shakhatreh, H., Sawalmeh, A. H., Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I., Othman, N. S., Khreishah, A., and Guizani, M., “Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges,” IEEE Access, Vol. 7, 2019, pp. 48572–48634.
[2] Scalea, J. R., Restaino, S., Scassero, M., Blankenship, G., Bartlett, S. T., and Wereley, N., “An initial investigation of unmanned aircraft systems (UAS) and real-time organ status measurement for transporting human organs,” IEEE Journal of translational engineering in health and medicine, Vol. 6, 2018, pp. 1–7.
[3] Girard, A. R., Howell, A. S., and Hedrick, J. K., “Border patrol and surveillance missions using multiple unmanned air vehicles,” 2004 43rd IEEE conference on decision and control (CDC)(IEEE Cat. No. 04CH37601), Vol. 1, IEEE, 2004, pp. 620–625.
[4] M. Burgess, “Small drones are giving Ukraine an unprecedented edge,” Wired, 06-May-2022. [Online]. [Accessed: 10-May-2022].
[5] CNN, “Turkish drone is so effective, Ukrainian troops are singing about it,” YouTube, 07-Apr-2022. [Online]. Available: https://www.youtube.com/watch?v=S4qUsPCFV28. [Accessed: 18-May-2022].
[6] Fortune Business Insights, “Unmanned Aerial Vehicle Market Size: UAV industry report 2027,” Unmanned Aerial Vehicle Market Size | UAV Industry Report 2027. [Online]. Available: https://www.fortunebusinessinsights.com/industry-reports/unmanned-aerial-vehicle-uav-market-101603. [Accessed: 18-May-2022].
[7] Hann, R., and Johansen, T. A., “UAV icing: the influence of airspeed and chord length on performance degradation,” Aircraft Engineering and Aerospace Technology, Vol. 93, 2021, pp. 832–841.
[8] Sørensen, K. L., Borup, K. T., Hann, R., Bernstein, B. C., and Hansbø, M., “Atmospheric icing limitations, climate report for Norway and surrounding regions,” Tech. rep., UBIQ Aerospace, 2021.
